




























CLIQUEZ ICI POUR TÉLÉCHARGER CETTE ÉTUDE DE CAS
Les lacs urbains jouent un rôle crucial dans les villes modernes, contribuant à la maîtrise des inondations, à la recharge des nappes phréatiques, à la qualité de l'eau et à l'esthétique urbaine. Face à l'intensification du développement urbain autour de ces lacs, l'obtention de données topographiques sous-marines précises devient essentielle à la conception technique et à la gestion écologique.
Cette étude de cas illustre le déploiement de l'USV iBoat BS12 de Hi-Target, équipé d'Android, pour réaliser un relevé topographique sous-marin d'un grand lac urbain à Bangkok, en Thaïlande. Le projet met en évidence l'efficacité, l'adaptabilité et l'aptitude de l'USV à des eaux intérieures complexes et confinées.
Défis de l'arpentage des lacs urbains
Dans les environnements urbains denses comme Bangkok, les méthodes traditionnelles de relevé topographique sous-marin utilisant des bateaux habités présentent plusieurs limites :
· Accès restreint : Les rivages encombrés et les entrées d’eau étroites rendent difficile la mise à l’eau et la manœuvre de bateaux de grande taille.
· Problèmes de sécurité : Le trafic piétonnier élevé et les environs animés augmentent les risques opérationnels.
· Lacunes dans les données : Les zones inaccessibles ou peu profondes à proximité des côtes peuvent être manquées ou mal capturées.
Ces limitations ont clairement nécessité une solution bathymétrique compacte, flexible et intelligente, capable d’accéder à des espaces restreints sans compromettre la qualité des données.

Figure 1. Aperçu du site d'enquête
Solution
L'iBoat BS12 est un navire de surface léger et sans équipage, piloté par Android, spécialement conçu pour les missions de surveillance en eaux intérieures. Doté d'une coque élégante en fibre de carbone et Kevlar, il allie durabilité et portabilité. Sa taille compacte lui permet d'être transporté dans le coffre d'un véhicule et mis à l'eau en solitaire, ce qui le rend idéal pour les sites urbains restreints.
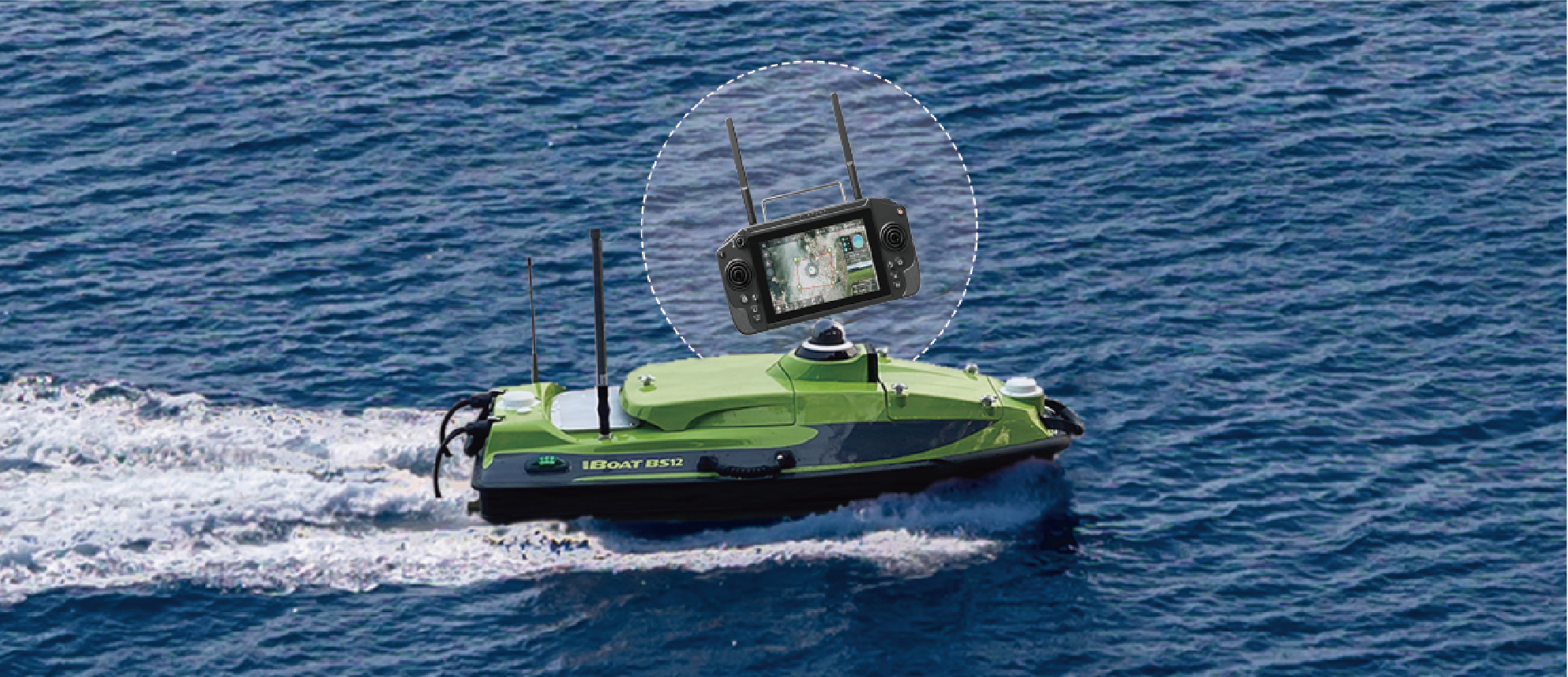
Figure 2. iBoat BS12 : USV multifonctions fonctionnant sous Android
Caractéristiques principales :
● Propulsion et conception : Coque optimisée CFD ; vitesse de pointe de 6 m/s ; stable en eau agitée.
● Navigation : Le module GNSS + IMU intégré assure un positionnement sous-métrique même avec des signaux satellites intermittents.
● Capteurs : Échosondeur mono-faisceau intégré, caméra 360° et radar à ondes millimétriques pour la détection d'obstacles.
● Système de contrôle : Exploité via l'application Android Hi-Survey Boat avec des modes manuel ou entièrement autonome.
● Continuité de la mission : Prend en charge la reprise des points d'arrêt, idéale pour les enquêtes à grande échelle sur plusieurs sessions.
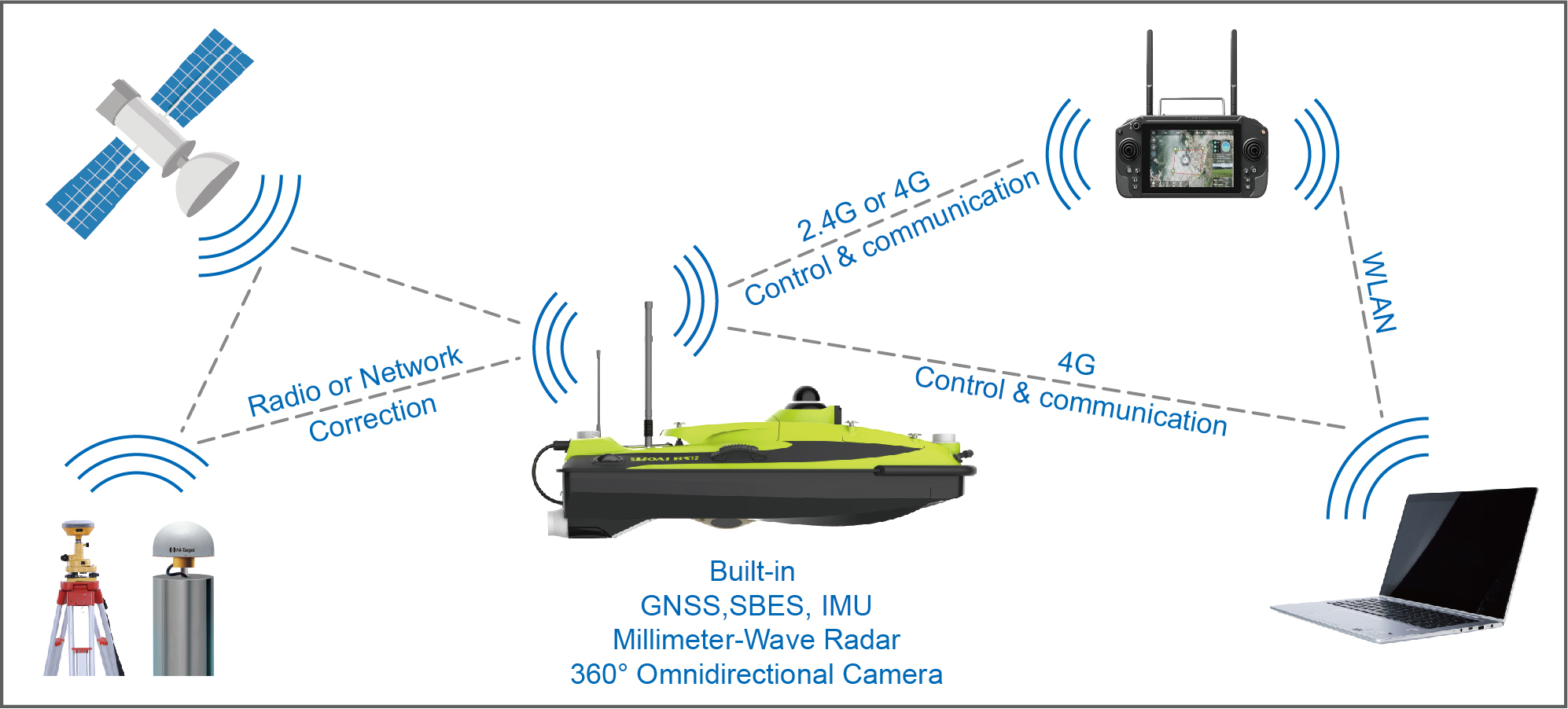
Figure 3. Principe de fonctionnement
Opération sur le terrain
L'étude a été réalisée sur un lac urbain de 250 000 m² situé dans une zone commerciale et touristique à forte densité du nord de Bangkok. Ce lac joue un rôle essentiel dans la régulation des eaux pluviales et l'équilibre écologique de la région. Avec le développement de projets de construction le long de son périmètre, l'obtention de données topographiques sous-marines précises était cruciale pour la conception des fondations et les études d'impact environnemental.
Grâce à sa conception compacte, l'iBoat BS12 a été déployé directement depuis le véhicule. Sa portabilité et sa rapidité d'installation en font un outil idéal pour les zones urbaines animées et à accès restreint.

Figure 4. Déploiement de l'iBoat BS12
Grâce au logiciel intégré de planification de mission compatible avec Google Maps, l'équipe d'enquête a défini les lignes de levé, les intervalles d'espacement et les zones de couverture en 5 minutes. Le logiciel permet un tracé intuitif des lignes et des zones, avec des fonctions d'espacement et d'orientation automatiques pour répondre aux différents besoins d'enquête.
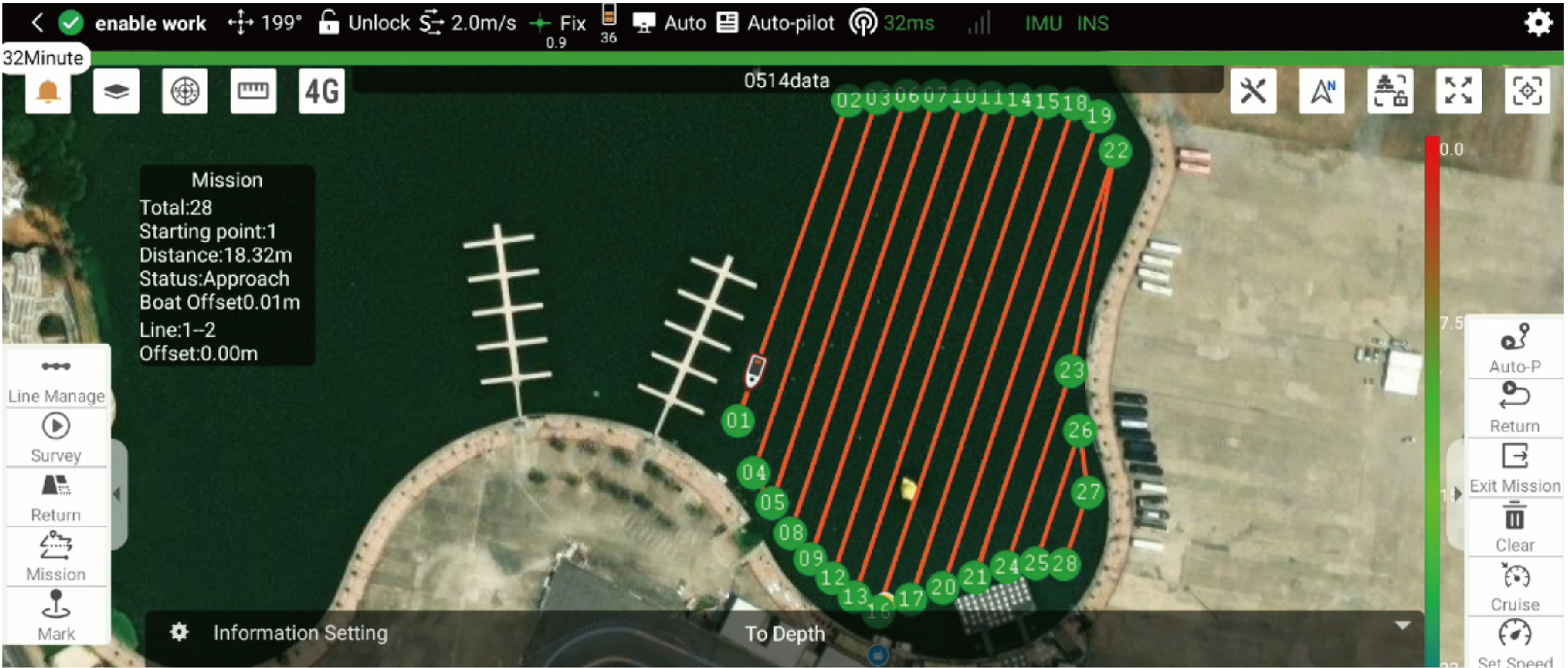
Figure 5. Planification de mission avec l'interface Google Maps
Une fois la mission définie, le BS12 a entamé une navigation entièrement autonome, collectant des données topographiques sous-marines en temps réel tout au long de son parcours. Aucune intervention manuelle n'a été nécessaire : les opérateurs ont simplement surveillé la collecte de données depuis la côte.

Figure 6. Bathymétrie autonome en cours
Compte tenu de l'étendue du lac, les opérations ont duré plus d'une journée. La fonction de reprise après un point d'arrêt a permis à l'équipe d'interrompre l'enquête à tout moment et de la reprendre au même endroit le lendemain, sans reconfigurer l'installation ni les données.
Traitement et visualisation des données
Une fois la collecte des données terminée, les informations ont été téléchargées à partir de la télécommande et traitées à l'aide de HiMAX, le logiciel de données hydrographiques propriétaire de Hi-Target.
Le flux de travail de post-traitement comprenait la détection et la suppression automatiques des points de profondeur anormaux, la génération en un clic de cartes de contour pour visualiser la variation de profondeur et la modélisation 3D pour une visualisation détaillée du terrain sous-marin.
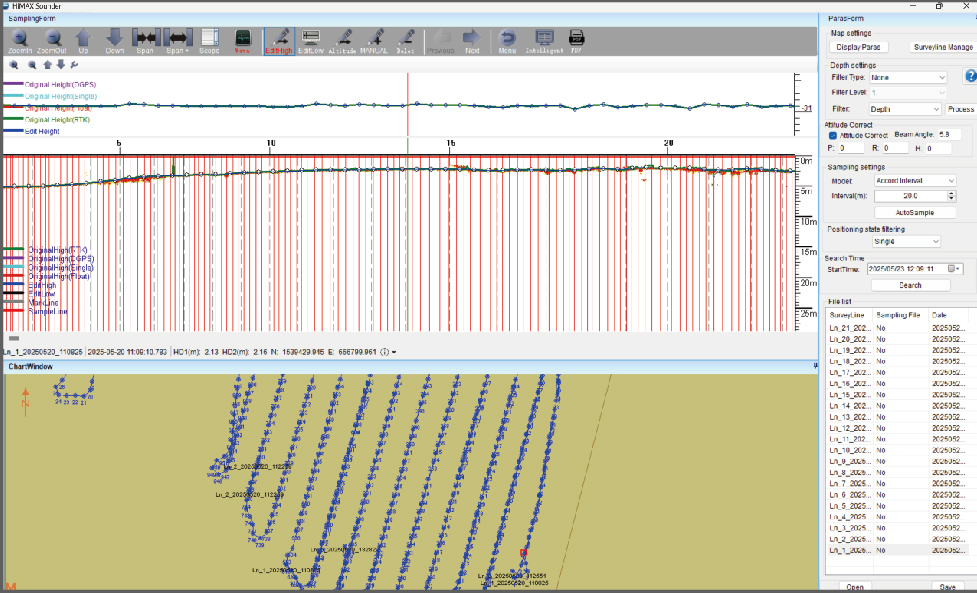
Figure 7. Suppression d'anomalies dans le logiciel HiMAX
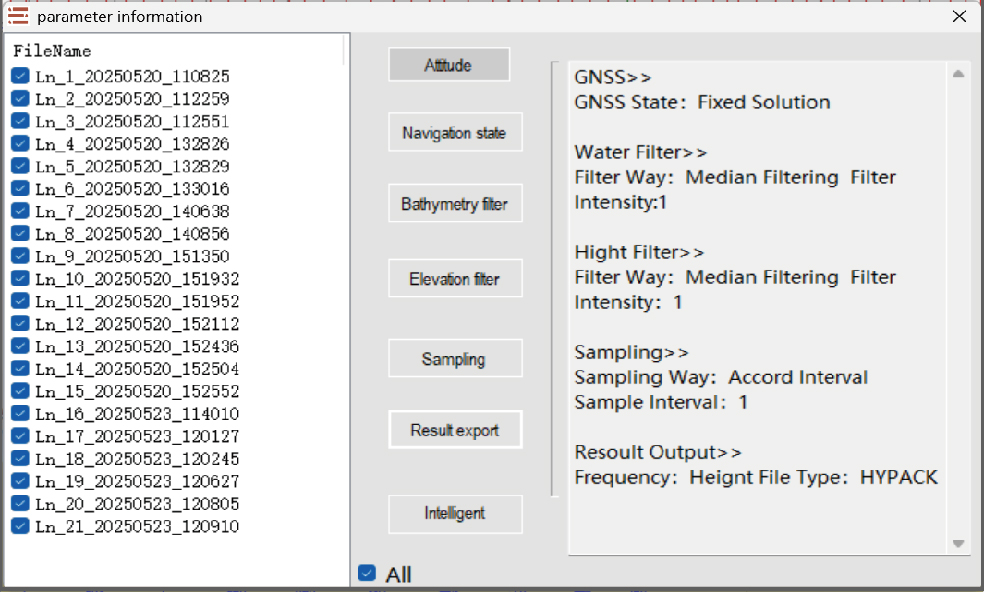
Figure 8. Carte des contours de profondeur générée automatiquement
Au cours de l'étude, nous avons également prélevé une coupe transversale afin de valider l'exactitude des données bathymétriques et de garantir leur conformité aux spécifications requises. Les résultats de la validation ont démontré que 95,121 points de données se situaient dans l'intervalle de confiance défini, confirmant ainsi la précision et la fiabilité supérieures des résultats de l'iBoat BS12.
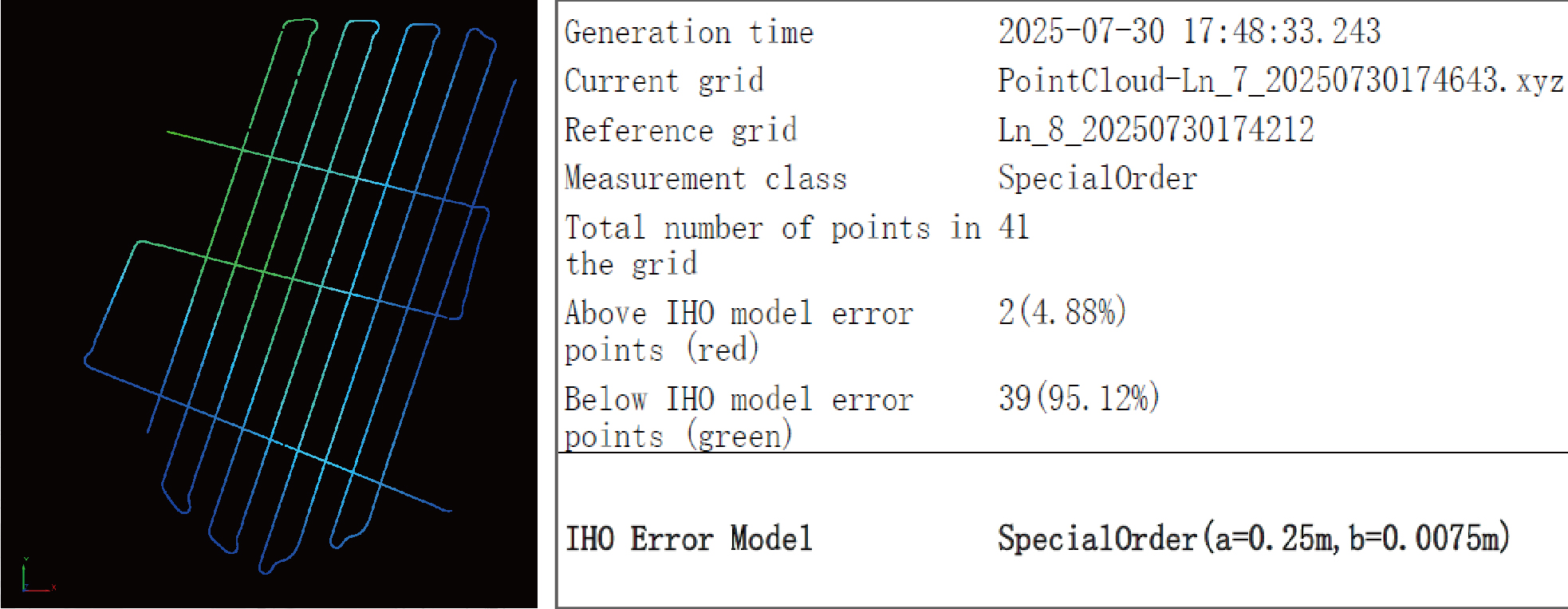
Figure 9. Analyse de superposition pour la vérification de la précision
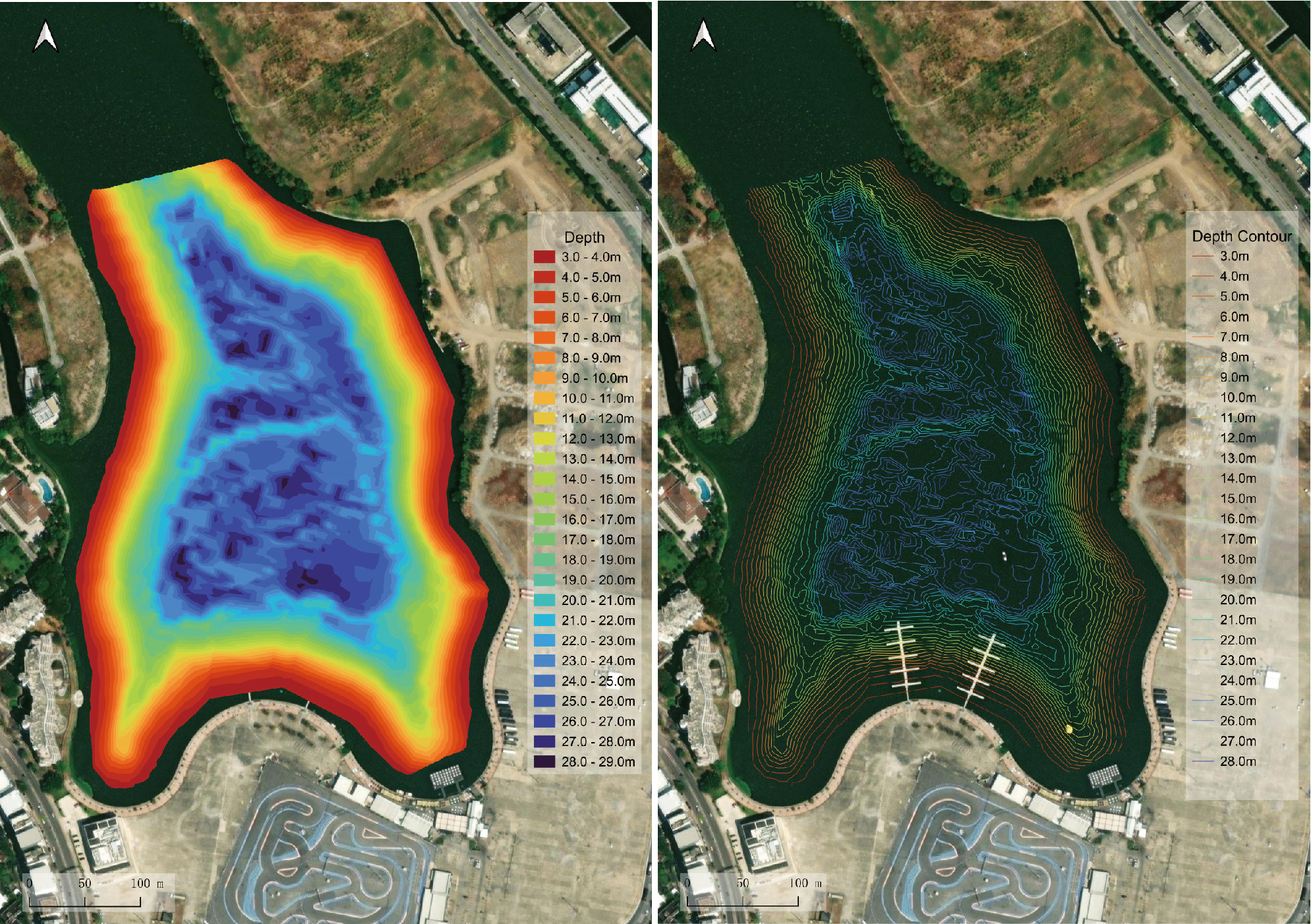
Figure 10. Contour de profondeur visualisé
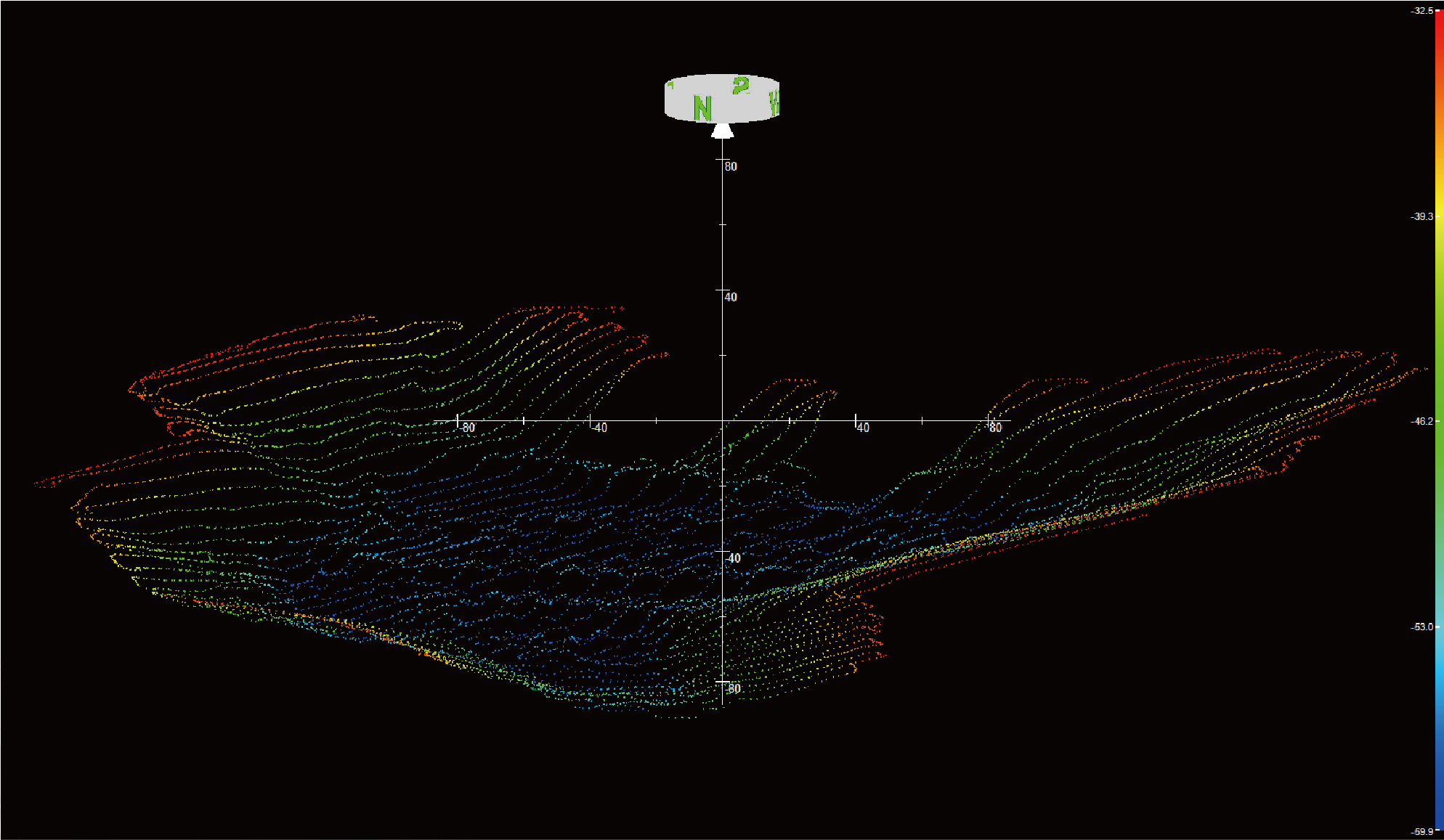
Figure 11. Modèle de terrain du lit du lac en 3D
Ces résultats ont fourni une représentation claire et précise de la structure du fond du lac, prenant en charge les applications en aval telles que l’évaluation des sédiments, la planification de la construction et les études écologiques.
Résultat et valeur
Le projet a permis de produire avec succès une carte topographique sous-marine haute résolution d’un lac urbain complexe et construit, ce qui aurait été difficile, long, voire impossible à réaliser avec des bateaux habités traditionnels.
Principaux avantages :
● Déploiement rapide et effectif réduit
● Fonctionnement sûr et efficace dans des environnements aquatiques étroits ou encombrés
● Données de profondeur de haute précision avec intégration transparente dans les flux de travail de post-traitement
● Évolutivité révolutionnaire, en particulier pour les missions d'enquête de grande envergure ou sur plusieurs jours
Ce cas démontre comment le iBoat BS12 USV redéfinit la topographie bathymétrique des eaux intérieures en proposant une solution intelligente et compacte pour la collecte de données précises dans des environnements difficiles. Elle permet aux municipalités, aux ingénieurs civils et aux spécialistes de l'environnement de prendre des décisions éclairées, améliorant ainsi la gestion des voies navigables et la résilience urbaine.
Aperçu : Étude du lac urbain iBoat BS12


Les tâches liées à l'eau simplifiées. La précision redéfinie.
Apprenez-en davantage sur l'iBoat BS12 et sur la manière dont il permet aux professionnels de l'hydrographie d'agir dans des scénarios réels.