




























CLIQUE AQUI PARA BAIXAR ESTE ESTUDO DE CASO
Os lagos urbanos desempenham um papel crucial nas cidades modernas, contribuindo para o controle de enchentes, recarga de águas subterrâneas, qualidade da água e estética urbana. À medida que o desenvolvimento urbano se intensifica ao redor desses lagos, a obtenção de dados topográficos subaquáticos precisos torna-se vital para projetos de engenharia e gestão ecológica.
Este estudo de caso mostra como o iBoat BS12 USV da Hi-Target, equipado com Android, foi implantado para realizar um levantamento topográfico subaquático de um grande lago urbano em Bangkok, Tailândia. O projeto destaca a eficiência, a adaptabilidade e a adequação do USV a águas interiores complexas e confinadas.
Desafios no levantamento de lagos urbanos
Em ambientes urbanos densos como Bangkok, os métodos tradicionais de levantamento topográfico subaquático usando barcos tripulados apresentam diversas limitações:
· Acesso restrito: Orlas lotadas e entradas estreitas de água dificultam o lançamento e a manobra de barcos de tamanho normal.
· Preocupações com a segurança: Tráfego intenso de pedestres e ambientes movimentados aumentam os riscos operacionais.
· Lacunas de dados: Zonas inacessíveis ou rasas perto das margens podem ser perdidas ou mal capturadas.
Essas limitações criaram uma necessidade clara de uma solução de batimetria compacta, flexível e inteligente, capaz de acessar espaços apertados sem comprometer a qualidade dos dados.

Figura 1. Visão geral do local da pesquisa
Solução
O iBoat BS12 é uma embarcação de superfície não tripulada, leve, controlada por Android, projetada especificamente para missões de levantamento em águas interiores. Com um casco elegante feito de fibra de carbono e Kevlar, combina durabilidade e portabilidade. Seu tamanho compacto permite que seja transportado no porta-malas de um veículo e lançado com apenas uma mão, tornando-o ideal para locais urbanos com restrições.
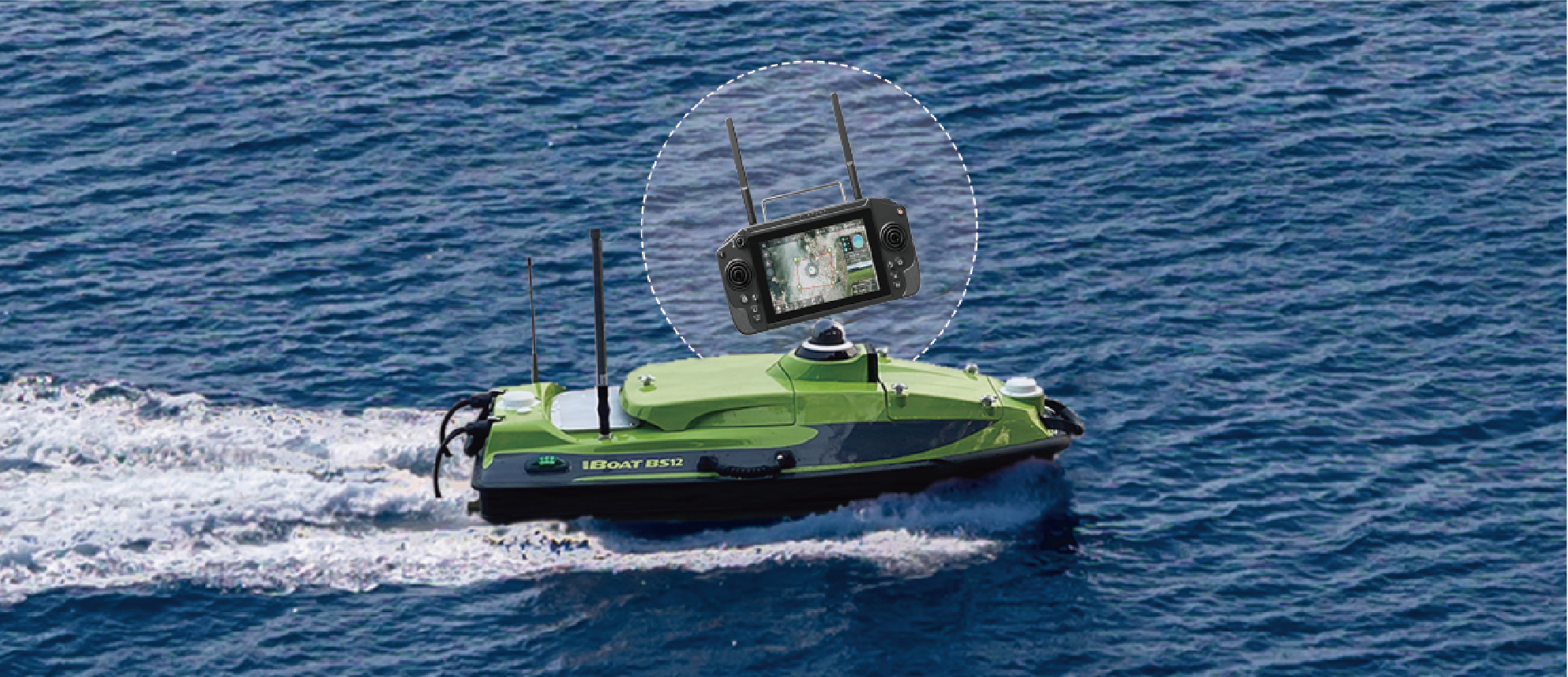
Figura 2. iBoat BS12: USV multifuncional com Android
Principais características:
● Propulsão e Design: Casco otimizado por CFD; velocidade máxima de 6 m/s; estável em águas agitadas.
● Navegação: O módulo GNSS + IMU integrado garante posicionamento submétrico mesmo com sinais de satélite intermitentes.
● Sensores: Ecobatímetro de feixe único integrado, câmera de 360° e radar de ondas milimétricas para detecção de obstáculos.
● Sistema de controle: Operado pelo aplicativo Hi-Survey Boat para Android com modos manual ou totalmente autônomo.
● Continuidade da Missão: Suporta retomada de ponto de interrupção — ideal para pesquisas de grande escala em várias sessões.
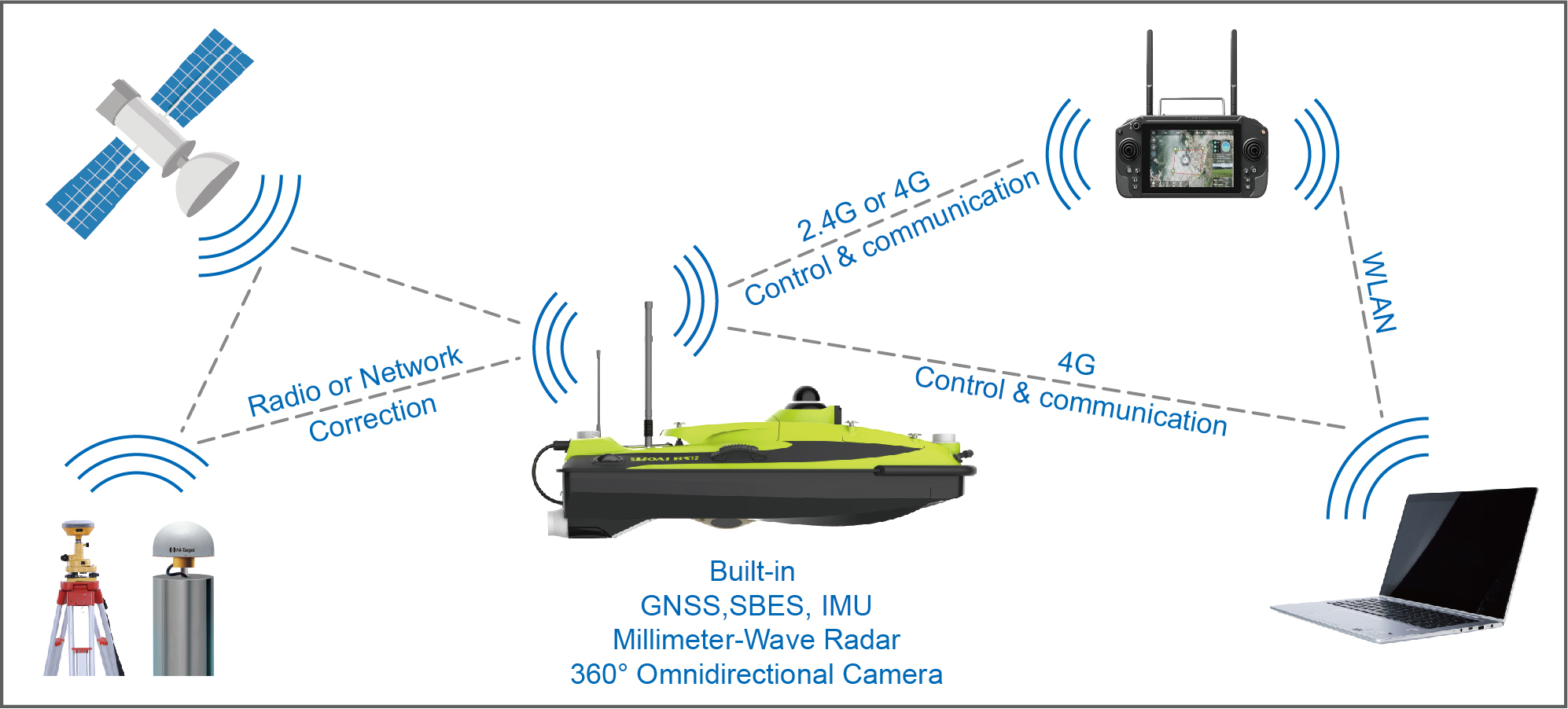
Figura 3. Princípio de funcionamento
Operação de campo
O levantamento foi realizado em um lago urbano de 250.000 m² localizado em uma zona comercial e turística de alta densidade no norte de Bangkok. Este lago desempenha um papel vital na regulação das águas pluviais e no equilíbrio ecológico da região. Com projetos de construção em desenvolvimento ao longo de seu perímetro, a obtenção de dados topográficos subaquáticos precisos foi crucial tanto para o projeto da fundação quanto para as avaliações de impacto ambiental.
Graças ao seu design compacto, o iBoat BS12 foi implantado diretamente do veículo. Sua portabilidade e configuração rápida o tornaram ideal para áreas urbanas movimentadas com acesso restrito.

Figura 4. Implantação do iBoat BS12
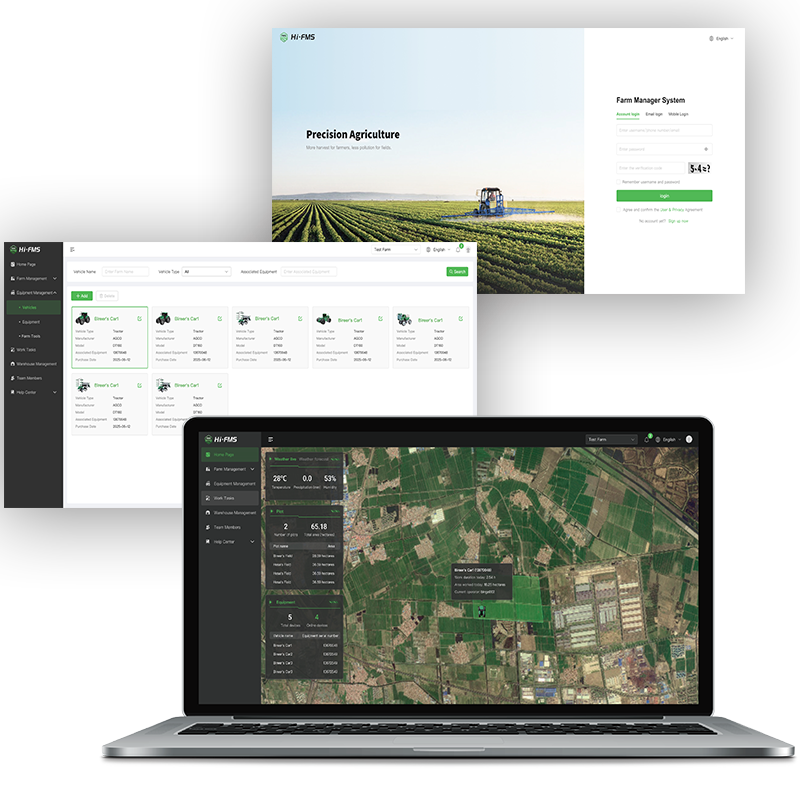
Utilizando o software integrado de planejamento de missão com suporte do Google Maps, a equipe de levantamento definiu linhas de levantamento, intervalos de espaçamento e zonas de cobertura em 5 minutos. O software permite o desenho intuitivo de linhas e áreas, com recursos automáticos de espaçamento e orientação para atender a diversas necessidades de levantamento.
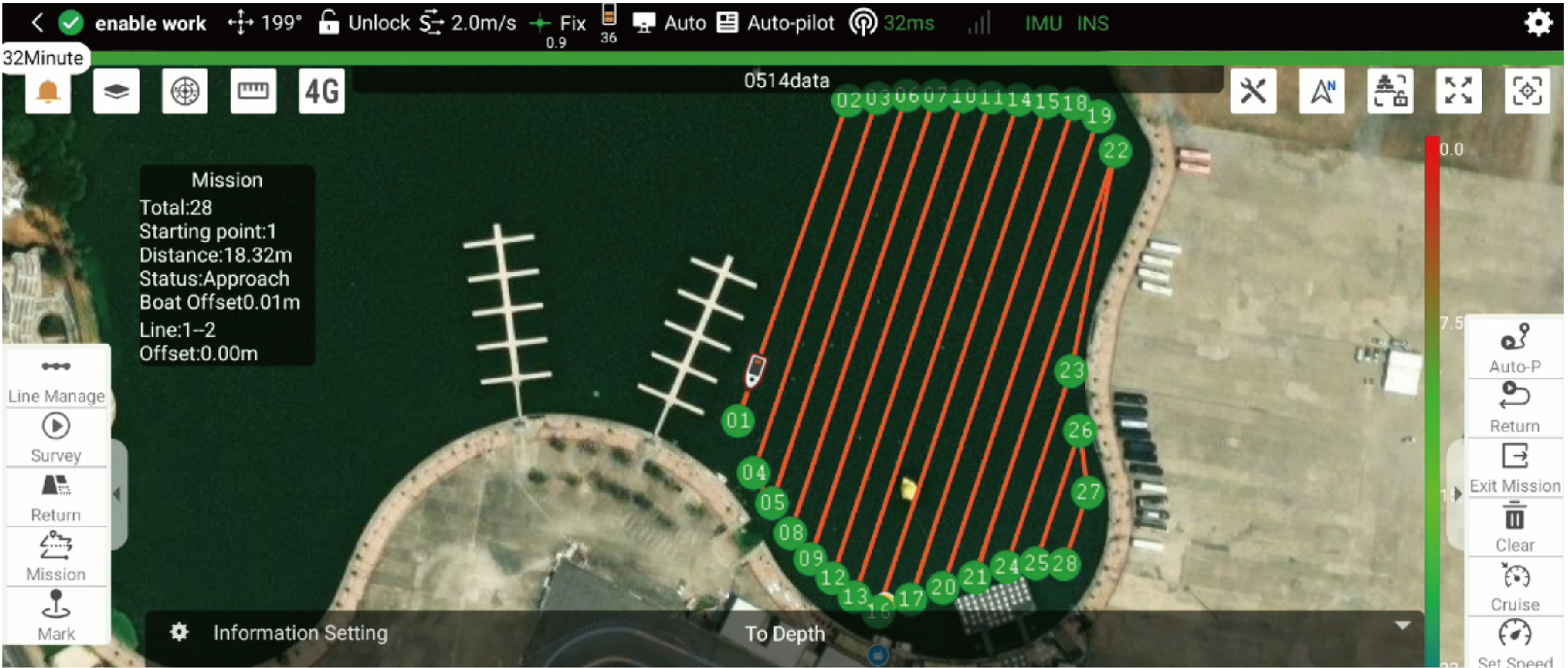
Figura 5. Planejamento de missão com interface do Google Maps
Após o planejamento da missão, o BS12 iniciou a navegação totalmente autônoma, coletando dados topográficos subaquáticos em tempo real ao longo de sua rota. Não foi necessária intervenção manual — os operadores simplesmente monitoraram a coleta de dados da costa.

Figura 6. Batimetria autônoma em andamento
Dada a escala do lago, as operações se estenderam por mais de um dia. A função de retomada do ponto de interrupção permitiu que a equipe pausasse a pesquisa a qualquer momento e continuasse exatamente do mesmo local no dia seguinte — sem reconfigurar a configuração ou os dados.
Processamento e Visualização de Dados
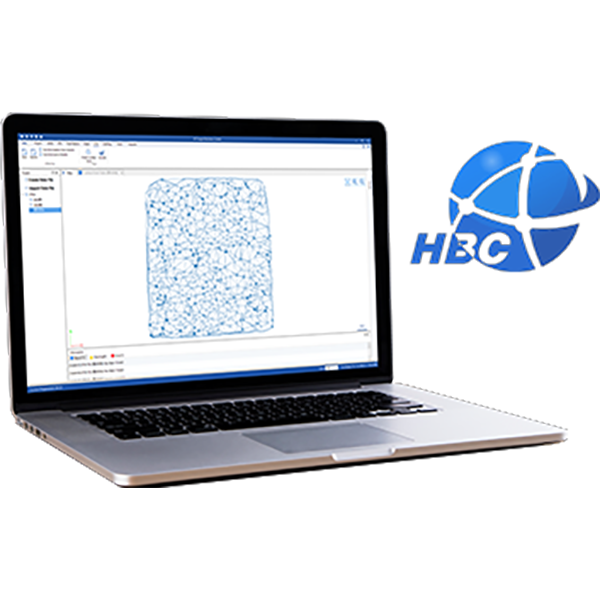
Após a conclusão da coleta de dados, as informações foram baixadas do controle remoto e processadas usando o HiMAX, o software de dados hidrográficos proprietário da Hi-Target.
O fluxo de trabalho de pós-processamento incluiu detecção e remoção automáticas de pontos de profundidade anômalos, geração de mapas de contorno com um clique para visualizar a variação de profundidade e modelagem 3D para visualização detalhada do terreno subaquático.
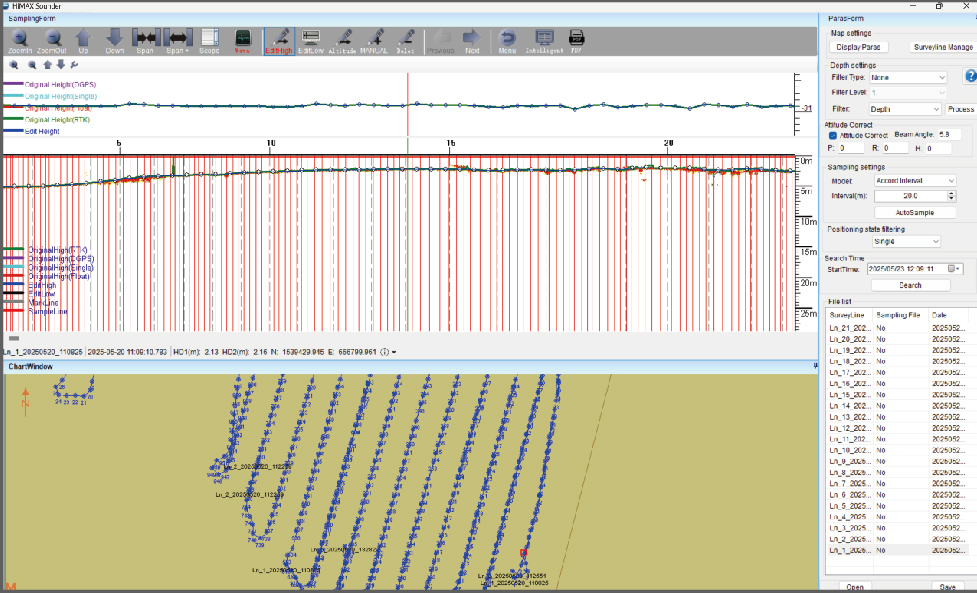
Figura 7. Remoção de anomalias no software HiMAX
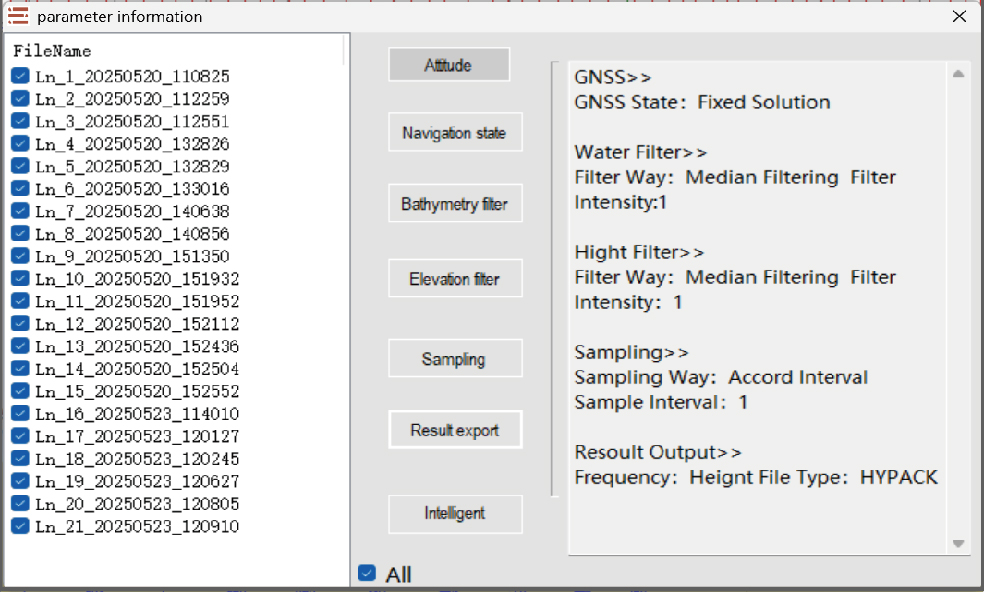
Figura 8. Mapa de contorno de profundidade gerado automaticamente
Durante a pesquisa, também coletamos uma amostra transversal para validar a precisão dos dados batimétricos e garantir a conformidade com as especificações exigidas. Os resultados da validação comprovaram que 95.12% de todos os pontos de dados estavam dentro do intervalo de confiança definido, confirmando a precisão e a confiabilidade superiores dos resultados do iBoat BS12.
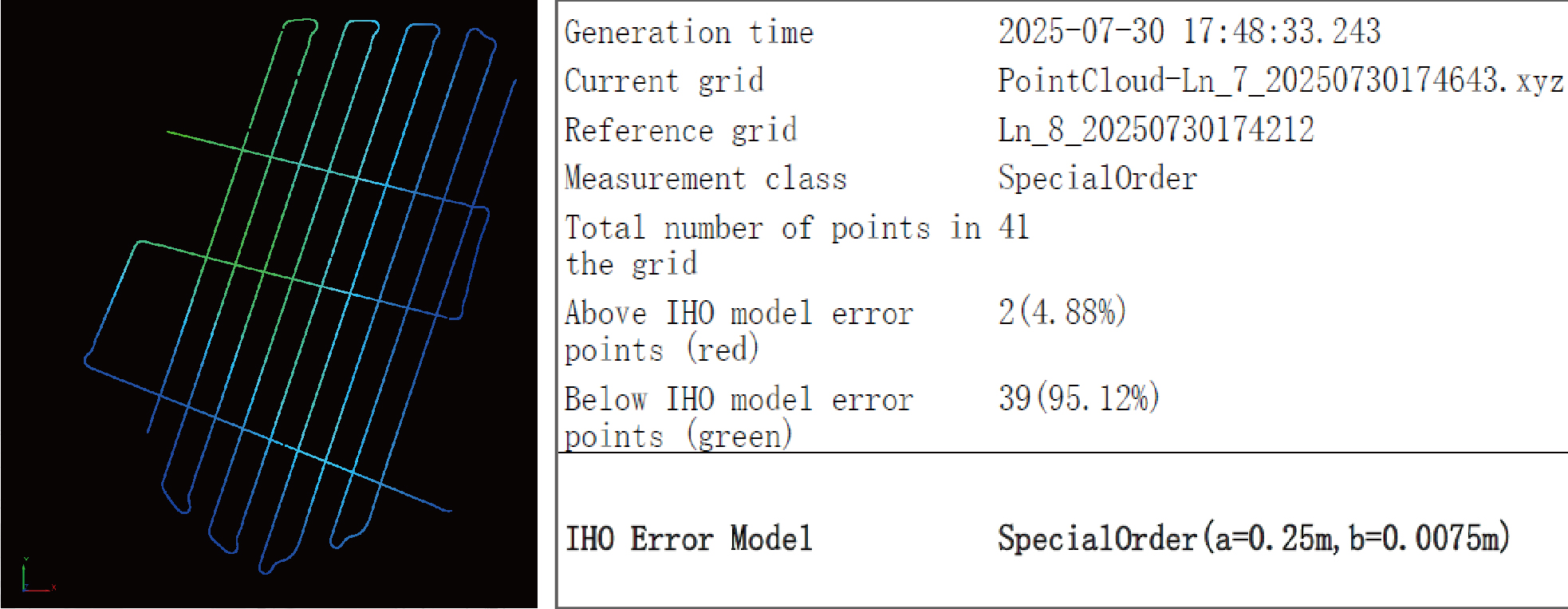
Figura 9. Análise de sobreposição para verificação de precisão
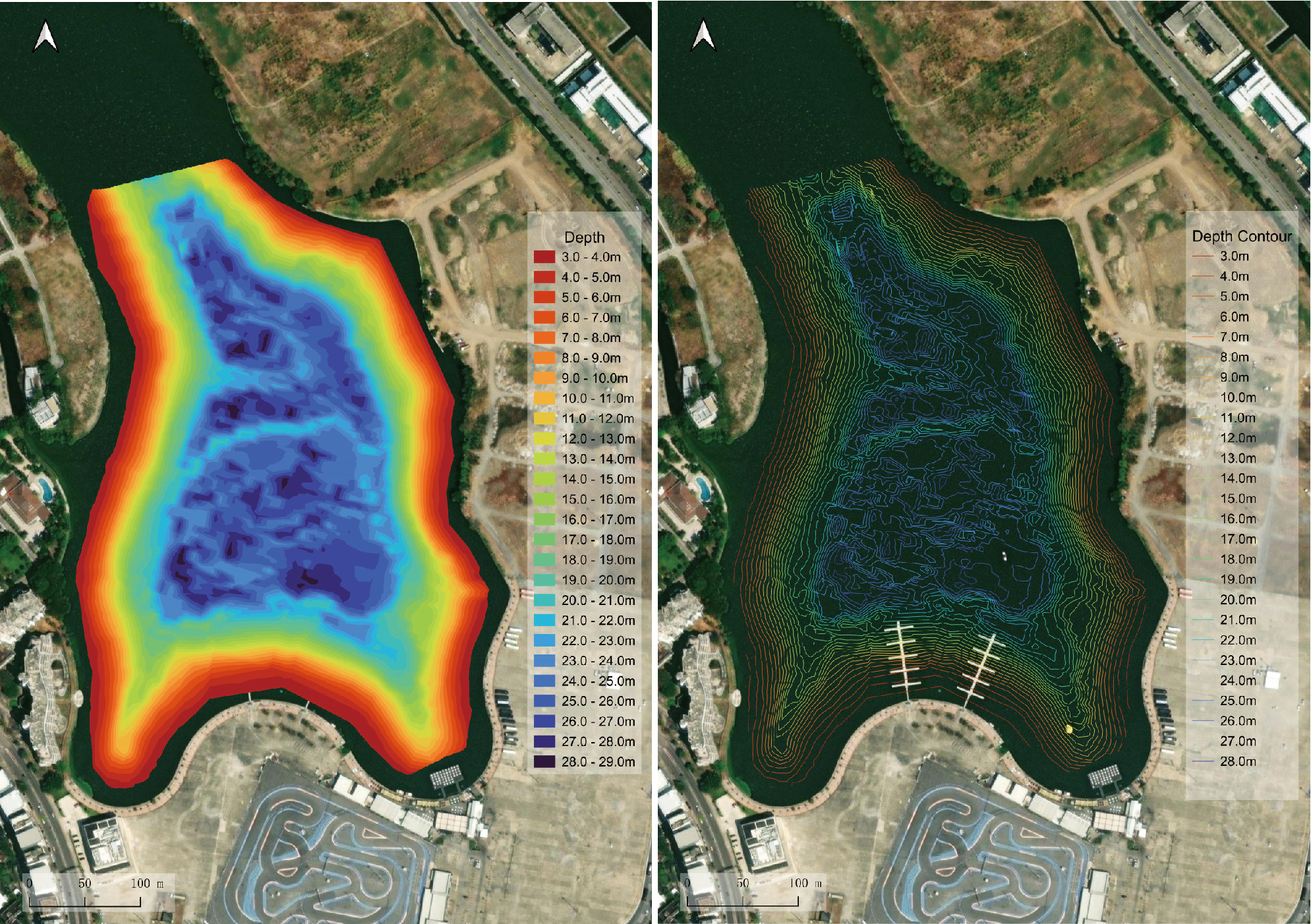
Figura 10. Contorno de profundidade visualizado
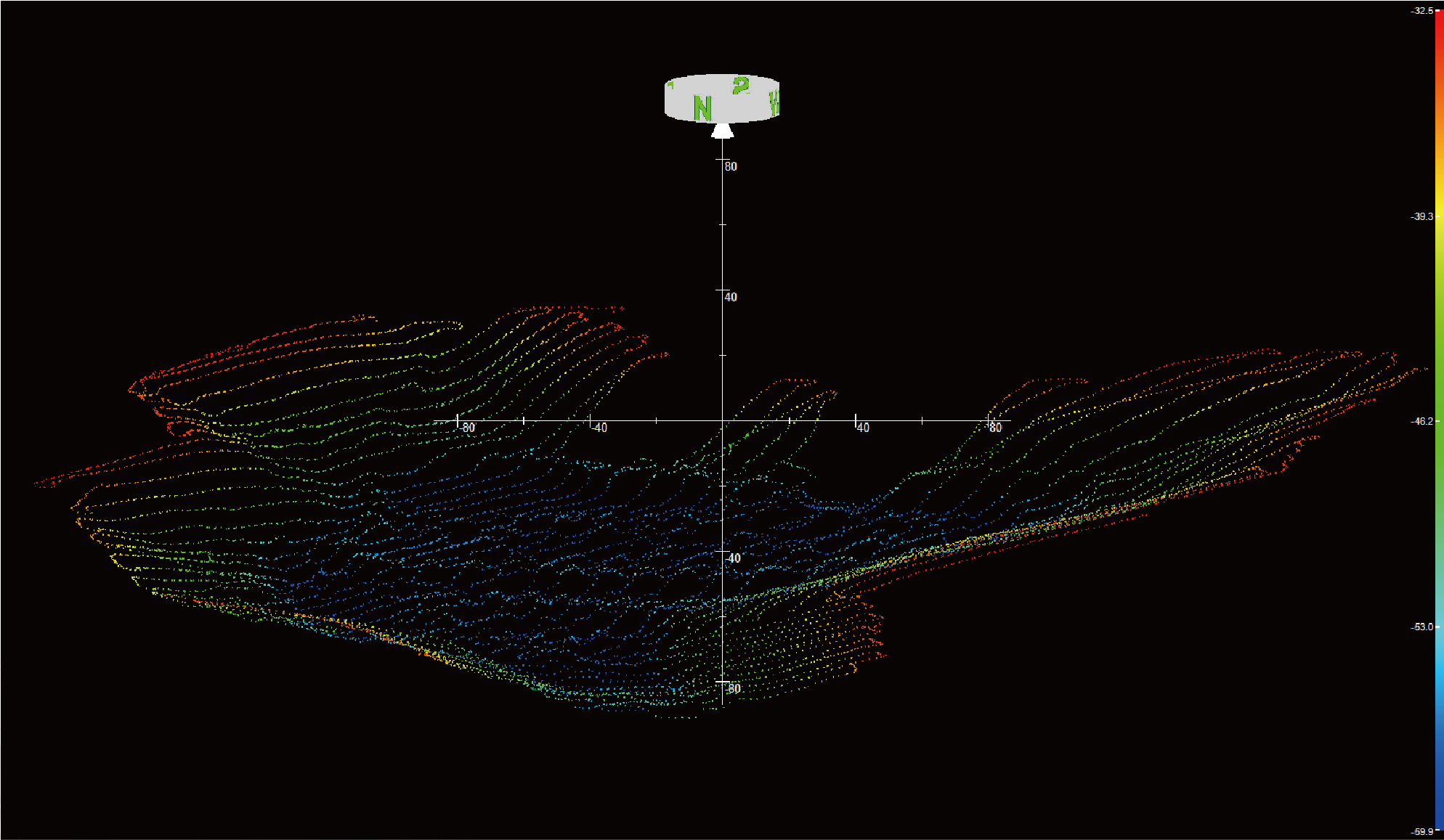
Figura 11. Modelo 3D do terreno do leito do lago
Esses resultados forneceram uma representação clara e precisa da estrutura do leito do lago, dando suporte a aplicações posteriores, como avaliação de sedimentos, planejamento de construção e estudos ecológicos.
Resultado e Valor
O projeto produziu com sucesso um mapa topográfico subaquático de alta resolução de um lago urbano complexo e construído, algo que teria sido difícil, demorado ou até mesmo impraticável usando barcos tripulados tradicionais.
Principais benefícios:
● Implantação rápida e redução de mão de obra
● Operação segura e eficiente em ambientes de águas estreitas ou lotadas
● Dados de profundidade de alta precisão com integração perfeita em fluxos de trabalho de pós-processamento
● Escalabilidade inovadora, especialmente para missões de pesquisa grandes ou de vários dias
Este caso demonstra como o iBoat BS12 USV redefine o levantamento batimétrico de águas interiores, oferecendo uma solução inteligente e compacta para a coleta de dados precisos em ambientes desafiadores. Capacita municípios, engenheiros civis e especialistas ambientais a tomar decisões informadas, aprimorando a gestão de hidrovias e a resiliência urbana.
Visão geral: Levantamento de lagos urbanos iBoat BS12


Tarefas relacionadas à água simplificadas. Precisão redefinida.
Saiba mais sobre o iBoat BS12 e como ele capacita profissionais hidrográficos em cenários do mundo real.