




























Por Richard Pan e Seven Zhao
Hi-Target International Group Limited
1. Histórico da pesquisa
Anteriormente, era preciso investir mais de 30 mil dólares para adquirir drones profissionais de mapeamento e posicionar um grande número de pontos de controle no solo para obter mapas precisos e com qualidade de levantamento topográfico. Essa situação persistiu até a DJI lançar a série Phantom 4 de drones comerciais com antena GNSS integrada e câmeras gimbal de alta definição. Este artigo propõe uma solução comercial de mapeamento por drone, o Phantom PPK, para reduzir significativamente os pontos de controle, explica o fluxo de trabalho, os métodos de teste e como os resultados comprovam esse nível de precisão no mapeamento por drone.
2. Introdução
O Phantom 4 RTK (P4R) é um drone de consumo com tecnologia avançada e custo-benefício, popular no mercado. Flexível, simples de operar e compatível com navegação RTK em nível de cm, além de sincronização de câmera em microssegundos, dispensa calibração do usuário, sendo particularmente adequado para uso em áreas urbanas densamente povoadas e com topografia complexa.
Apesar de haver uma antena GNSS RTK integrada a bordo, que permite ao sistema de piloto automático marcar diretamente as coordenadas de posicionamento e os fatores de precisão nos atributos de imagem (EXIF) após acessar as fontes diferenciais da rede NTRIP, o PPK (cinemática pós-processada, sem necessidade de conexão em tempo real entre a estação base e o drone) é um método mais confiável para evitar interrupções de correção que ocorrem frequentemente em áreas urbanas e sem cobertura de sinal 4G. Além disso, o erro GNSS corrigido é proporcional à distância da estação base ao drone (linha de base), portanto, uma base PPK a algumas centenas de metros do drone fornece correções de posição de qualidade significativamente superior em comparação com uma estação base de rede (NTRIP CORS) potencialmente a poucos quilômetros de distância.
A solução de mapeamento Phantom 4 PPK consiste nos três componentes principais a seguir.
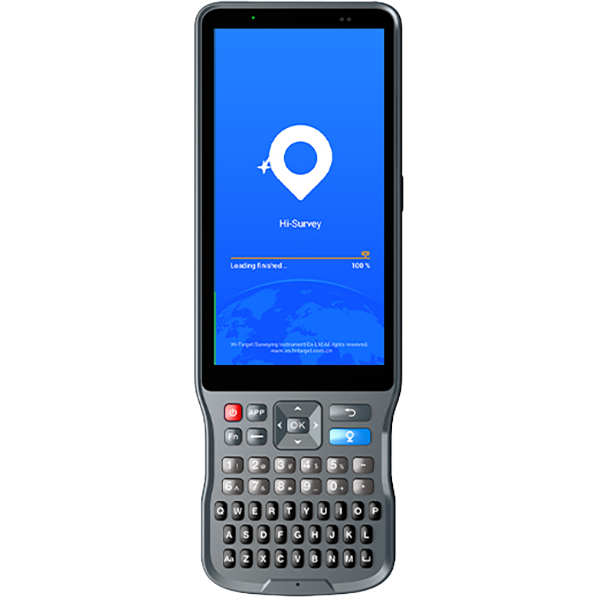
1) Plataforma de drones
Inclui o drone Phantom 4 RTK, câmera gimbal, controle remoto, bateria e acessórios, que são usados para coleta de dados de campo e registro de dados de observação estática bruta.

Figura 2-1 Phantom 4 RTK e Inno1 Portable RTK
2) Base de aterramento PPK
Um RTK portátil Hi-Target inno1 é usado para fornecer dados de observação estáticos brutos básicos, estáveis e confiáveis para o processamento do PPK. Ele também pode funcionar como um rover RTK para medir os pontos de verificação no local.
3) Software de pós-processamento PPK
O PPK Go é um software pronto para uso que permite que drones Phantom 4 obtenham os dados de posicionamento de câmera mais precisos e confiáveis em qualquer sistema de coordenadas, sem a necessidade de medir alvos ou GCPs. Com precisão de 2 cm nas dimensões X, Y e Z, o arquivo de texto de saída com informações de posição ou imagens georreferenciadas pode ser usado diretamente nos principais softwares de mapeamento fotogramétrico ou modelagem 3D.
3. Validação de precisão
Nossa equipe selecionou um parque industrial em um ambiente urbano típico como local para o teste real, a fim de validar a precisão dos resultados finais. O processo de teste específico é dividido nas três partes a seguir, detalhadas abaixo.

Figura 3-1 Fluxo de trabalho principal
3.1 Missão de Campo
1) Aquisição de pontos de verificação e planejamento de missão
Os pontos de controle são usados para melhorar a precisão dos modelos aéreos. A densidade e a distribuição afetam o ajuste da triangulação aérea e, consequentemente, a precisão dos resultados finais. Para este teste, como mostrado na Figura 4, oito pontos foram posicionados uniformemente dentro e fora da área. P1, P3 e P7 foram planejados como pontos de controle e os demais como pontos de verificação.
As coordenadas dos pontos P1 a P8 foram adquiridas utilizando o RTK portátil inno1 quando o erro da solução fixa convergiu para o nível milimétrico. Cada ponto foi observado independentemente trinta vezes e o valor médio foi considerado como resultado da medição. A distribuição detalhada dos pontos e suas coordenadas medidas são mostradas na Figura 3-1 e na Tabela 1, respectivamente.

Figura 3-2 Distribuição de GCPs e pontos de verificação e área de missão
Observe que os pontos de verificação P2, P4 e P6 estão fora da zona de voo. Queríamos testar situações de levantamento não ideais.
Tabela 3-1 Coordenadas medidas de cada ponto
|
Nome do ponto |
X |
E |
Z |
|
P1 |
742465.791 |
2543503.116 |
9.152 |
|
P2 |
742169.699 |
2543661.506 |
10.208 |
|
P3 |
742339.347 |
2543618.654 |
10.012 |
|
P4 |
742731.754 |
2543604.535 |
10.209 |
|
P5 |
742761.276 |
2543474.312 |
10.549 |
|
P6 |
742642.264 |
2543302.036 |
8.592 |
|
P7 |
742400.706 |
2543392.754 |
8.598 |
|
P8 |
742126.295 |
2543385.074 |
10.639 |
2) Aquisição de dados
Primeiro, configure a estação base no ponto conhecido, meça a altura do instrumento e então inicie a gravação estática em intervalos de 1 Hz antes do voo.
A área de mapeamento foi selecionada no aplicativo instalado no controle remoto e a missão planejada de acordo com os parâmetros da Tabela 2. Ativamos simultaneamente a função de geomarcação RTK (NTRIP) para comparar a diferença na precisão dos modos RTK e PPK.
Tabela 3-2 Parâmetros da missão de voo
|
100 m AGL |
Clima |
Ensolarado |
|
|
Velocidade de voo |
7 m/s |
Sobreposição lateral e superior |
80%/70% |
|
Escala fotográfica |
3:2 |
Ângulo PTZ |
-90o |
|
Correção de distorção integrada |
Desligado |
Meridiano central |
114o |
|
Sistema de coordenadas |
WGS-84 UTM 49N |
Velocidade do vento |
Brisa |
|
Pastor alemão |
3,9 cm |
Área de planejamento |
0,427 km2 |
A missão de voo levou cerca de 18 minutos e um total de 267 imagens foram coletadas, todas georreferenciadas com coordenadas fixas RTK.
3.2 Processamento PPK
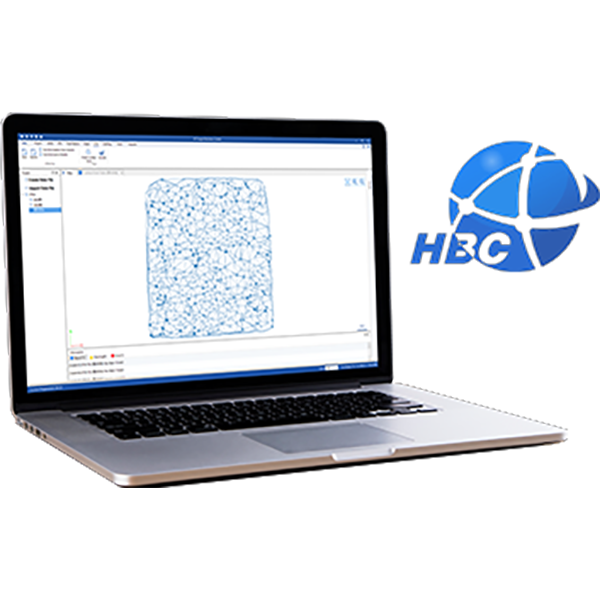
Executei o software de pós-processamento PPK Go, criei novos projetos e importei os dados da estação base e do projeto de voo separadamente. O software verificou automaticamente a integridade do conjunto de dados e comparou as imagens, as observações brutas e o arquivo de registro de data e hora na pasta.
Após configurar o elipsoide e a projeção e inserir as coordenadas conhecidas da estação base, cliquei no botão de processamento para iniciar o processamento. O ponto de referência com a solução fixa foi marcado em verde no gráfico da interface.

Figura 3-3 Após o processamento PPK, todos os waypoints foram corrigidos
Por fim, clique em "Exportar" para geocodificar as coordenadas de alta precisão processadas nas imagens e salvá-las como um novo conjunto de dados.
3.3 Processamento de imagens e geração de DOM/DSM
Atualmente, existem diversos tipos de softwares de processamento de dados de imagens de drones disponíveis, como Pix4Dmapper, MetaShape, Inpho, Context Capture, Dronedeploy, etc. As funções dos softwares são semelhantes. Devido às diferenças em seus algoritmos, cada um apresenta suas vantagens. Este projeto de validação utilizou o Pix4Dmapper para processamento de imagens, um software de processamento de dados de drones e imagens aéreas amplamente utilizado e totalmente automatizado. Consiste em três etapas:
1) Processamento inicial
Crie novos projetos, importe arquivos de imagem, edite coordenadas e forneça um sistema de projeção. As informações de geolocalização de cada imagem são lidas e exibidas automaticamente no campo de propriedades EXIF. Após a confirmação e a inicialização rápida, o software concluirá automaticamente as seguintes etapas.
● Extração de pontos-chave: identifique características específicas como pontos-chave nas imagens.
●Correspondência de pontos-chave: encontre quais imagens têm os mesmos pontos-chave e combine-os.
●Otimização do modelo de câmera: Calibre os parâmetros internos (distância focal…) e externos (orientação…) da câmera.
●Geolocalização GPS/GCP: localize o modelo se as informações de geolocalização forem fornecidas.
● Pontos de Amarração Automáticos são criados durante esta etapa. Eles são a base para as próximas etapas do processamento.
2)Nuvem de pontos e malha
Esta etapa se baseará nos Pontos de Amarração Automáticos com Densificação de Pontos e Malha Texturizada 3D.
3)DSM, geração de DOM
Após a conclusão do processamento, clicamos no editor de mosaico para ajustar a imagem e concluir a geração do modelo digital de superfície (DSM) e do mapa ortofotográfico digital (DOM).
Os três conjuntos de dados a seguir foram processados separadamente e, finalmente, três conjuntos de mapas DOM/DSM foram gerados:
a. Dados NTRIP RTK georreferenciados, sem GCP.
b. Dados PPK, sem GCP.
c. Dados NTRIP RTK georreferenciados, P1, P3, P7 funcionaram como GCPs.

Figura 3-4 DSM produzido pelo software Pix4Dmapper

Figura 3-5 DOM produzido pelo software Pix4Dmapper
4. Precisão do ponto de verificação
Após o processamento dos dados, consultamos as coordenadas de cada ponto de verificação no mapa e as comparamos com as coordenadas RTK correspondentes medidas para calcular as variâncias dX, dY e dZ. Os resultados são apresentados nas Tabelas 3 e 5.
dS é o erro quadrático médio pontual calculado de acordo com as dimensões dX e dY. A fórmula de cálculo refere-se à fórmula 4-1, na qual dS é o erro quadrático médio pontual, Δi é o desvio do componente coordenado, n é o número de pontos para a precisão da avaliação e as unidades são metros.

Tabela 4-1 Tabela estatística do erro quadrático médio do ponto_Geotagged NTRIP RTK_noGCP
|
Desvio de coordenadas |
Ponto RMS |
Nome do ponto |
Desvio de coordenadas |
Ponto RMS |
|||||
|
dXum |
diaum |
dZum |
dSum |
dXum |
diaum |
dZum |
dSum |
||
|
P1 |
0.009 |
-0.016 |
-0.122 |
0.018 |
P5 |
-0.036 |
-0.052 |
-0.139 |
0.063 |
|
P2 |
-0.029 |
-0.006 |
-0.108 |
0.030 |
P6 |
0.026 |
0.094 |
-0.112 |
0.098 |
|
P3 |
-0.027 |
0.006 |
-0.142 |
0.028 |
P7 |
-0.026 |
0.026 |
-0.178 |
0.037 |
|
P4 |
-0.044 |
-0.185 |
-0.159 |
0.190 |
P8 |
0.025 |
0.026 |
-0.199 |
0.036 |

Figura 4-1 Distribuição da precisão do ponto de verificação_Geotagged NTRIP RTK_noGCP
Tabela 4-2 Tabela estatística do erro quadrático médio do ponto_PPK_noGCP
|
Nome do ponto |
Desvio de coordenadas |
Ponto RMS |
Nome do ponto |
Desvio de coordenadas |
Ponto RMS |
||||
|
dXb |
diab |
dZb |
dSb |
dXb |
dXb |
diab |
dZb |
||
|
P1 |
0.039 |
-0.016 |
-0.052 |
0.042 |
P5 |
0.014 |
-0.042 |
-0.069 |
0.044 |
|
P2 |
-0.029 |
-0.006 |
-0.018 |
0.030 |
P6 |
0.046 |
0.094 |
-0.042 |
0.105 |
|
P3 |
0.003 |
-0.004 |
-0.072 |
0.005 |
P7 |
0.024 |
0.036 |
-0.038 |
0.043 |
|
P4 |
-0.034 |
-0.205 |
-0.069 |
0.208 |
P8 |
0.015 |
0.046 |
0.081 |
0.048 |

Figura 4-2 Distribuição da precisão do ponto de verificação_PPK_noGCP
Tabela 4-3 Tabela estatística do erro quadrático médio do ponto_NTRIP RTK_3 GCPs ajustados
|
Nome do ponto |
Desvio de coordenadas |
Ponto RMS |
Nome do ponto |
Desvio de coordenadas |
Ponto RMS |
||||
|
dXc |
dYc |
dZc |
dSc |
dXc |
dXc |
dYc |
dZc |
||
|
P1 |
-0.010 |
-0.026 |
0.008 |
0.028 |
P5 |
-0.026 |
-0.042 |
0.051 |
0.049 |
|
P2 |
-0.039 |
-0.016 |
0.032 |
0.042 |
P6 |
0.026 |
0.094 |
0.038 |
0.098 |
|
P3 |
-0.037 |
-0.034 |
0.018 |
0.050 |
P7 |
-0.026 |
0.036 |
-0.028 |
0.044 |
|
P4 |
-0.044 |
-0.185 |
-0.019 |
0.190 |
P8 |
-0.005 |
0.036 |
-0.049 |
0.036 |

Figura 4-3 Distribuição da precisão do ponto de verificação_ NTRIP RTK_3 GCPs ajustados
Conforme mostrado nos gráficos acima, pode-se analisar que a precisão horizontal do NTRIP RTK e do PPK está dentro de 5 cm sem correção de pontos de controle, o que representa a precisão ideal para levantamentos topográficos. Na dimensão de elevação, a precisão do RTK precisa ser corrigida com um pequeno número de pontos de controle para atingir o mesmo nível do PPK. A precisão de elevação é mais suscetível à correção de pontos de controle em relação à horizontal. Quando o NTRIP RTK, que pode ser afetado pela qualidade da comunicação e pelo ambiente de trabalho, é levado em consideração, o PPK proporciona uma otimização de precisão mais confiável e estável, além de ser menos dependente de pontos de controle.
A precisão dos pontos P4 e P6 é pior em relação aos demais, tanto no modo RTK quanto no PPK. E quando corrigidos pelo ponto de controle, sua precisão é significativamente melhorada. Para pontos fora da zona de cobertura da rota, sua precisão é relativamente baixa sob a condição de GCP zero, sendo necessário otimizá-los expandindo adequadamente a área da rota ou colocando um pequeno número de pontos de controle.
5. Conclusão
A partir da análise experimental acima, pode-se concluir que a solução Phantom PPK oferece precisão consistente de até 5 cm ou menos (dependendo do GSD) em todo o levantamento. Comparado ao método tradicional de mapeamento por drone, ele reduz significativamente a dependência de pontos de controle, alivia a carga de trabalho de campo, melhora a eficiência e a segurança e fornece uma solução comercial confiável e econômica para mapeamento por drone.
Referências
[1] Liu Jianguo. Pesquisa sobre o método de produção de produtos de topografia e mapeamento baseados em drones DJI [J]. Cidade Inteligente, 2019(18).
[2] Guo, SM Estudo de mapeamento em larga escala e modelagem tridimensional baseado em fotografia aérea de drones [D]. 2017.
[3] Zhang Wei, Fu Ling, Chen Xiaosong. Aplicação de mapeamento topográfico de 1:500 baseado em fotografia de drone[J]. Mapeamento de Pequim, 2017(S1):132-135.
[4] Jiang Lili, Gao Tianghong, Bai Min. Aplicação da tecnologia de processamento de imagens de drones em engenharia de mapeamento e levantamento básico em larga escala[J]. Mapeamento e Informação Geográfica Espacial, 2013(07):184-186.
[5] Administração Geral de Supervisão de Qualidade, Inspeção e Quarentena da República Popular da China, Comitê Nacional de Administração de Padronização da China. GB/T 7930-2008 1:500 1:1000 1:2000 Norma Interna para Fotogrametria Aérea de Topografia [S]. Pequim: China Standards Press, 2008.
[6] Zhu SF, Yang L., Peng A. Análise de precisão do Phantom 4 RTK em mapeamento de mapa topográfico 1:500 [J]. Materiais de Construção de Jiangxi, 2019(8).