




























リチャード・パン&セブン・ジャオ
ハイターゲット・インターナショナル・グループ・リミテッド
1. 研究の背景
これまで、高精度な測量レベルの地図を作成するには、3万ドル以上を投じてプロ仕様のマッピングドローンを購入し、地上に多数のコントロールポイントを設置する必要がありました。DJIがGNSSアンテナと高解像度ジンバルカメラを搭載した商用ドローンPhantom 4シリーズを発売するまで、この状況は変わりませんでした。本稿では、コントロールポイントを大幅に削減するPhantom PPKを用いた商用ドローンマッピングソリューションを提案し、そのワークフロー、テスト方法、そしてこのレベルのドローンマッピング精度を裏付ける結果について説明します。
2. はじめに
Phantom 4 RTK(P4R)は、技術的に成熟し、コストパフォーマンスに優れたコンシューマーグレードのドローンで、市場で高い人気を誇っています。柔軟性が高く、操作が簡単で、RTKによるセンチメートルレベルのナビゲーション、マイクロ秒単位のカメラ同期、ユーザーキャリブレーション不要など、優れた性能を備えています。特に、建物が密集した都市部や複雑な地形のエリアでの使用に最適です。
統合型GNSS RTKアンテナが搭載されているため、自動操縦システムはNTRIPネットワーク差分ソースにアクセスした後、測位座標と精度係数を画像属性(EXIF)に直接タグ付けできますが、PPK(後処理キネマティック、ベースステーションとドローン間のリアルタイム接続は不要)は、都市部や4G信号カバレッジのない地域で頻繁に発生する補正中断を回避するより信頼性の高い方法です。また、補正されたGNSSエラーはベースステーションからドローンまでの距離(ベースライン)に比例するため、ドローンから数百メートル離れたPPKベースセットは、数キロメートル離れたネットワークベースステーション(NTRIP CORS)と比較して、はるかに高品質の位置修正を提供します。
Phantom 4 PPK マッピング ソリューションは、次の 3 つの主要コンポーネントで構成されています。
1)ドローンプラットフォーム
これには、フィールド データの収集と生の静的観測データの記録に使用される Phantom 4 RTK ドローン、ジンバル カメラ、リモート コントロール、バッテリー、アクセサリが含まれます。

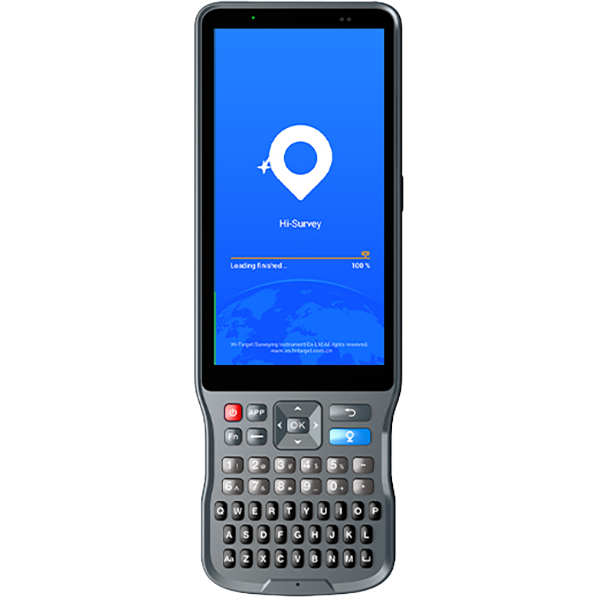
図2-1 Phantom 4 RTKとinno1ポータブルRTK
2)PPK地上基地
Hi-Target inno1ポータブルRTKは、PPK処理に必要な安定した信頼性の高い静的観測生データを提供するために使用されます。また、現場のチェックポイントを測定するためのRTKローバーとしても機能します。
3)PPK後処理ソフトウェア
PPK Goは、Phantom 4ドローンが、測定ターゲットやGCPを必要とせずに、あらゆる座標系において最も正確で信頼性の高いカメラ位置データを取得できるようにするターンキーソフトウェアです。X、Y、Z軸の精度は2cmで、位置情報またはジオタグ付き画像を含む出力テキストファイルは、主要な写真測量マッピングソフトウェアや3Dモデリングソフトウェアで直接使用できます。
3. 精度の検証
最終結果の精度を検証するため、実際のテスト場所として、典型的な都市環境にある工業団地を選択しました。具体的なテストプロセスは以下の3つの部分に分かれており、それぞれ詳細に説明します。

図3-1 主なワークフロー
3.1 フィールドミッション
1)チェックポイントの取得とミッション計画
コントロールポイントは、航空モデルの精度向上に使用されます。コントロールポイントの密度と分布は、空中三角測量の調整、ひいては最終結果の精度に影響します。このテストでは、図4に示すように、8つのポイントがエリアの内外に均等に配置されました。P1、P3、P7はコントロールポイントとして計画され、残りはチェックポイントでした。
点P1~P8の座標は、inno1ポータブルRTKを用いて、固定解の誤差がミリメートルレベルに収束した時点で取得された。各点は独立して30回観測され、その平均値が測定結果とされた。点の詳細な分布と測定座標は、それぞれ図3-1と表1に示されている。

図3-2 GCPとチェックポイントの分布とミッションエリア
チェックポイントP2、P4、P6は飛行区域外にあることに注意してください。これは、最適ではない調査状況をテストするためでした。
表3-1 各点の測定座標
|
ポイント名 |
X |
はい |
Z |
|
P1 |
742465.791 |
2543503.116 |
9.152 |
|
P2 |
742169.699 |
2543661.506 |
10.208 |
|
P3 |
742339.347 |
2543618.654 |
10.012 |
|
P4 |
742731.754 |
2543604.535 |
10.209 |
|
P5 |
742761.276 |
2543474.312 |
10.549 |
|
P6 |
742642.264 |
2543302.036 |
8.592 |
|
P7 |
742400.706 |
2543392.754 |
8.598 |
|
P8 |
742126.295 |
2543385.074 |
10.639 |
2) データ収集
まず、既知の地点にベースステーションを設置し、計器高度を測定し、飛行前に 1Hz 間隔で静的記録を開始します。
マッピングエリアはリモコンにインストールされたアプリで選択され、ミッションは表2のパラメータに従って計画されました。RTKジオタグ機能(NTRIP)を同時に有効にして、RTKモードとPPKモードの精度の違いを比較しました。
表3-2 飛行ミッションパラメータ
|
地上100メートル |
天気 |
晴れ |
|
|
飛行速度 |
7メートル/秒 |
オーバーラップとサイドラップ |
80%/70% |
|
写真スケール |
3:2 |
PTZ角度 |
-90度 |
|
歪み補正機能内蔵 |
オフ |
中央子午線 |
114度 |
|
座標系 |
WGS-84 UTM 49N |
風速 |
風 |
|
ジャーマンシェパード |
3.9cm |
計画エリア |
0.427km2 |
飛行ミッションには約 18 分かかり、合計 267 枚の画像が収集されました。そのすべてに、RTK 固定座標のジオタグが付けられていました。
3.2 PPK処理
PPK Go後処理ソフトウェアを実行し、新規プロジェクトを作成し、ベースステーションとフライトプロジェクトのデータを個別にインポートしました。ソフトウェアはデータセットの整合性を自動的にチェックし、画像、生の観測データ、およびフォルダ内のタイムスタンプファイルを照合しました。
楕円体と投影法を設定し、ベースステーションの既知の座標を入力した後、「処理」ボタンをクリックして処理を開始しました。インターフェースのグラフ上で、解が確定したウェイポイントが緑色でマークされました。

図3-3 PPK処理後、すべてのウェイポイントが修正されました
最後に、「エクスポート」をクリックして、処理された高精度座標を画像にジオタグし、新しいデータセットとして保存しました。
3.3 画像処理とDOM/DSM生成
現在、Pix4Dmapper、MetaShape、Inpho、Context Capture、Dronedeployなど、様々なドローン画像データ処理ソフトウェアが利用可能です。これらのソフトウェアの機能は似ていますが、アルゴリズムの違いにより、それぞれに利点があります。本検証プロジェクトでは、広く利用されている完全自動化されたドローンデータおよび空撮画像処理ソフトウェアであるPix4Dmapperを用いて画像処理を行いました。このプロセスは、以下の3つのステップで構成されています。
1)初期処理
新規プロジェクトの作成、画像ファイルのインポート、座標の編集、投影システムの提供を行います。各画像の位置情報は、EXIFプロパティフィールドから自動的に読み取られ、表示されます。確認と簡単な初期化を行うと、ソフトウェアは次の手順を自動的に実行します。
●キーポイント抽出:画像内の特定の特徴をキーポイントとして識別します。
●キーポイントマッチング:同じキーポイントを持つ画像を見つけてマッチングします。
●カメラモデルの最適化:カメラの内部パラメータ(焦点距離など)と外部パラメータ(向きなど)を調整します。
●地理位置情報 GPS/GCP: 地理位置情報が提供されている場合はモデルの位置を特定します。
●このステップでは自動タイポイントが作成されます。これが次のステップの処理の基礎となります。
2)点群とメッシュ
このステップでは、ポイント密度化と 3D テクスチャ メッシュを備えた自動タイ ポイントを構築します。
3)DSM、DOM生成
処理が完了したら、モザイク エディターをクリックして画像を微調整し、デジタル サーフェス モデル (DSM) とデジタル オルソフォト マップ (DOM) の生成を完了します。
次の 3 セットのデータが個別に処理され、最終的に 3 セットの DOM/DSM マップが生成されました。
a. GCP なしのジオタグ付き NTRIP RTK データ。
b. PPK データ、GCP なし。
c. ジオタグ付き NTRIP RTK データ、P1、P3、P7 は GCP として機能しました。

図3-4 Pix4Dmapperソフトウェアによって生成されたDSM

図3-5 Pix4Dmapperソフトウェアによって生成されたDOM
4. チェックポイントの精度
データ処理後、各チェックポイントの地図上の座標を取得し、対応するRTK測定座標と比較して、分散dX、dY、dZを計算しました。結果は表3~表5に示されています。
dSは、dXとdYの寸法に基づいて計算される点平均二乗誤差です。計算式は式4-1を参照します。ここで、dSはチェックポイント平均二乗誤差、Δiは座標成分の偏差、nは評価精度の点数であり、単位はメートルです。

表4-1 点平均二乗誤差の統計表_ジオタグ付きNTRIP RTK_GCPなし
|
座標偏差 |
ポイントRMS |
ポイント名 |
座標偏差 |
ポイントRMS |
|||||
|
dX1つの |
dY1つの |
dZ1つの |
dS1つの |
dX1つの |
dY1つの |
dZ1つの |
dS1つの |
||
|
P1 |
0.009 |
-0.016 |
-0.122 |
0.018 |
P5 |
-0.036 |
-0.052 |
-0.139 |
0.063 |
|
P2 |
-0.029 |
-0.006 |
-0.108 |
0.030 |
P6 |
0.026 |
0.094 |
-0.112 |
0.098 |
|
P3 |
-0.027 |
0.006 |
-0.142 |
0.028 |
P7 |
-0.026 |
0.026 |
-0.178 |
0.037 |
|
P4 |
-0.044 |
-0.185 |
-0.159 |
0.190 |
P8 |
0.025 |
0.026 |
-0.199 |
0.036 |

図4-1 チェックポイント精度の分布_ジオタグ付きNTRIP RTK_noGCP
表4-2 点平均二乗誤差_PPK_noGCPの統計表
|
ポイント名 |
座標偏差 |
ポイントRMS |
ポイント名 |
座標偏差 |
ポイントRMS |
||||
|
dXb |
dYb |
dZb |
dSb |
dXb |
dXb |
dYb |
dZb |
||
|
P1 |
0.039 |
-0.016 |
-0.052 |
0.042 |
P5 |
0.014 |
-0.042 |
-0.069 |
0.044 |
|
P2 |
-0.029 |
-0.006 |
-0.018 |
0.030 |
P6 |
0.046 |
0.094 |
-0.042 |
0.105 |
|
P3 |
0.003 |
-0.004 |
-0.072 |
0.005 |
P7 |
0.024 |
0.036 |
-0.038 |
0.043 |
|
P4 |
-0.034 |
-0.205 |
-0.069 |
0.208 |
P8 |
0.015 |
0.046 |
0.081 |
0.048 |

図4-2 チェックポイント精度_PPK_noGCPの分布
表4-3 点平均二乗誤差の統計表_NTRIP RTK_3 GCP調整済み
|
ポイント名 |
座標偏差 |
ポイントRMS |
ポイント名 |
座標偏差 |
ポイントRMS |
||||
|
dXc |
dYc |
dZc |
dSc |
dXc |
dXc |
dYc |
dZc |
||
|
P1 |
-0.010 |
-0.026 |
0.008 |
0.028 |
P5 |
-0.026 |
-0.042 |
0.051 |
0.049 |
|
P2 |
-0.039 |
-0.016 |
0.032 |
0.042 |
P6 |
0.026 |
0.094 |
0.038 |
0.098 |
|
P3 |
-0.037 |
-0.034 |
0.018 |
0.050 |
P7 |
-0.026 |
0.036 |
-0.028 |
0.044 |
|
P4 |
-0.044 |
-0.185 |
-0.019 |
0.190 |
P8 |
-0.005 |
0.036 |
-0.049 |
0.036 |

図4-3 チェックポイント精度の分布_NTRIP RTK_3 GCP調整済み
上図に示すように、NTRIP RTKとPPKの水平精度は、基準点補正なしでも5cm以内と、地形測量に最適な精度であることが分かります。標高次元では、RTKの精度をPPKと同等にするには、少数の基準点による補正が必要です。標高精度は、水平精度に比べて基準点補正の影響を受けやすいです。通信品質や作業環境の影響を受ける可能性のあるNTRIP RTKを考慮すると、PPKはより信頼性が高く安定した精度最適化を提供し、基準点への依存度が低くなります。
P4点とP6点は、RTKモードとPPKモードの両方で、他の点と比較して精度が低くなっています。コントロールポイントによる補正により、精度は大幅に向上します。ルートカバーゾーン外の点については、GCPがゼロの状態では精度が比較的低いため、ルートエリアを適切に拡張するか、少数のコントロールポイントを配置するなどして最適化する必要があります。
5. 結論
上記の実験分析から、Phantom PPKソリューションは、測量全体を通して一貫して5cm以下(地上分解能(GSD)に依存)の精度を実現できると結論付けられます。従来のドローンマッピング手法と比較して、コントロールポイントへの依存度を大幅に低減し、現場作業の負荷を軽減し、効率性と安全性の両方を向上させ、信頼性と費用対効果に優れた商用ドローンマッピングソリューションを提供します。
参考文献
[1] 劉建国. DJIドローンをベースとした測量・マッピング製品の製造方法の研究. スマートシティ, 2019(18).
[2] Guo, SM ドローン航空写真に基づく大規模マッピングと3次元モデリングの研究 [D]。2017年。
[3] 張偉、傅玲、陳暁松「ドローン写真に基づく1:500地形図作成の応用」北京地図、2017(S1):132-135。
[4] 江立麗、高天紅、白敏。「ドローン画像処理技術の大規模基礎地図作成および測量工学への応用」地図作成と空間地理情報、2013(07):184-186。
[5] 中華人民共和国国家質量監督検査検疫総局、中国国家標準化管理委員会。GB/T 7930-2008 1:500 1:1000 1:2000 地形の航空写真測量内部標準[S]。北京:中国標準出版社、2008年。
[6] Zhu SF、Yang L.、Peng A. 1:500 地形図マッピングにおける Phantom 4 RTK 精度分析[J]。江西省建築材料、2019(8)。